次世代マッピング・SLAMテクノロジー
販売価格 438万円(税込)
モバイル3Dスキャナー L-Replica

SLAM L-Replicaの特長:
- 小型・軽量、歩きながらスキャン可能
- GPSなしで室内外を計測する
- リアルタイムで点群データを出力
- 斜め計測が可能
- 車体、ドローンに搭載可能
使用例:
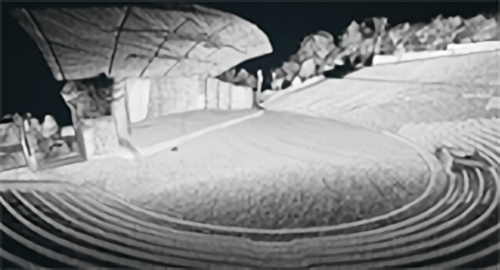
ドローンによる、災害初期の被災状況調査
L-ReplicaはハンドヘルドのSLAM 3Dスキャナーですが、UAVに搭載して計測も可能です。例えば、歩きながら、またはドローンに搭載し、被災直後の現場を短時間で計測できます。初動調査として使用でき、データは現場で見ることができます。


REAL-TIME LOCALIZATION AND MAPPING
リアルタイムで自己位置を推定し3D地図を作成する
GPSフリー、モバイルマッピングスキャナー(MMS)
モバイル3DスキャナーL-ReplicaはGPSデータを必要とせず、高密度・高速で室内外を計測して3Dモデル(点群データ)を作成します。
従来のMMSでは困難であった狭い道路、地下街、構造物直下、森林内を瞬時に計測できます。

SLAM L-Replicaについて:
- ライダーはVelodyne VLP-16
- ライダーの仕様:計測距離100m, 精度3cm
- Shaking Stabilzation algorithm を採用
- 重量は約1.5 kg
- 点群データの出力フォーマットはPLY
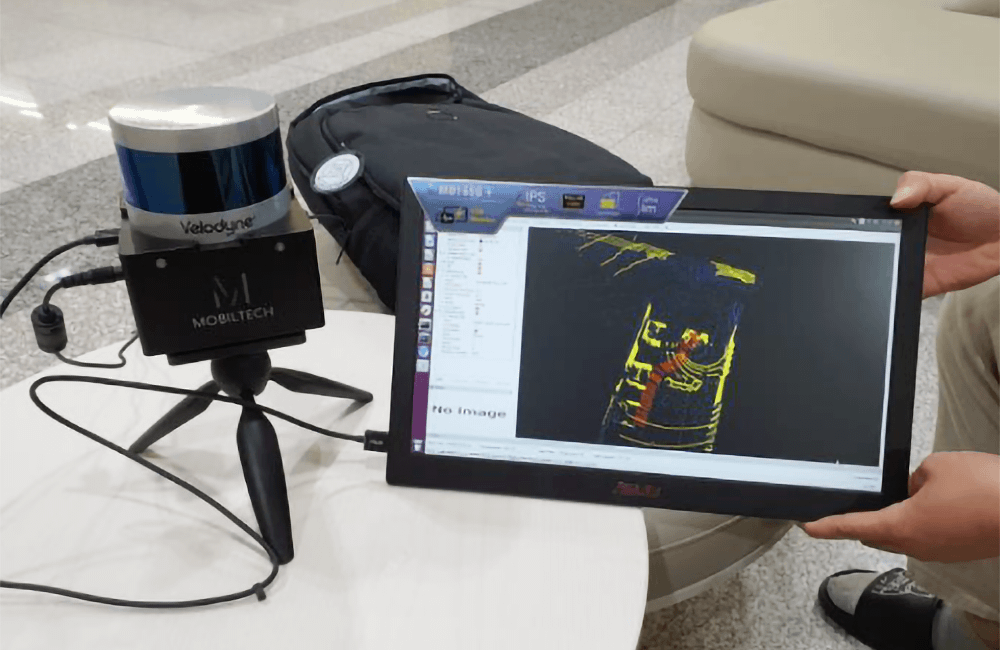
L-Replicaで計測業務の少人数化を図る
これまで複数の測量士で行なったきた現場の計測業務は、L-Replicaの使用で1名あるいは少人数で実施できるようになります。測量座標系への変換は、従来の3Dレーザースキャナーと同じくターゲット座標を利用します。歩きながら3Dスキャンし、スキャンの終了後、リアルタイムでデータが保存されます。L-Replicaの最大の特長は計測終了後、即、3Dデータを確認できることです。地上レーザースキャナーやMMSなどのモバイルシステム、 航空・ドローンレーザーの多くは、何らかのデータ処理を通して初めて3D点群として把握できます。L-Replicaは外部モニターを接続することで、データ確認を行い、欠損箇所などの把握がその場で可能になります。L-Replicaは現場でデータをチェックできます。
歩行中のスキャンの間、L-Replicaの操作とは開始から終了までに数回のボタンを押すだけです。操作手順は極めて単純です。業務の高度化が増す一方で短時間勤務・少人数労働が求められている現在、従来の数名による測量作業はL-Replicaの導入により、究極的には一人で完了できるようになります。
なお、L-Replicaは電源をONした場所がローカル原点としてデータが蓄積され、方向も電源ON時点での機材の設置向きでX軸が決定されます。従って、公共座標などへの変換は点群編集ソフトなどでの作業が必要になります。弊社は点群編集ソフト(OPT Cloud Survey)を販売しています。
モバイル3Dスキャナー L-Replicaとは
L-Replica
自社開発のLocalization & Mapping (自己位置推定&地図作成)用エンジンを搭載し、
GPSを使用せずとも、空間エリアを計測できます。
L-Replicaは軽量小型のハンドヘルド3Dスキャナーで、リアルタイムで点群データを作成します。自動でマッピング(位置情報の取り込みとデータ合成)を行います。L-Replicaは100mまで測定できるため地形測量に適しており、また地下街や室内の3Dモデリング、遺跡・遺構の調査、大型の構造物の検査などインフラの維持管理にも応用できます。幅数メートル内など道路や極小エリアを片手で持ち歩きながらスキャンできます。さらにヘルメットや自転車にも搭載でき、進行方向の両側・前後の領域を自動でスキャンしていきます。
GPSデータを取得できないビルの陰やドローンの規制区域の測量はこれまで、3Dモデルの作成には不向きでした。L-Replicaは今後、地上測量の一部として利用され、また空中計測データと合成することで完全な都市モデルや地形モデルを作成できます。
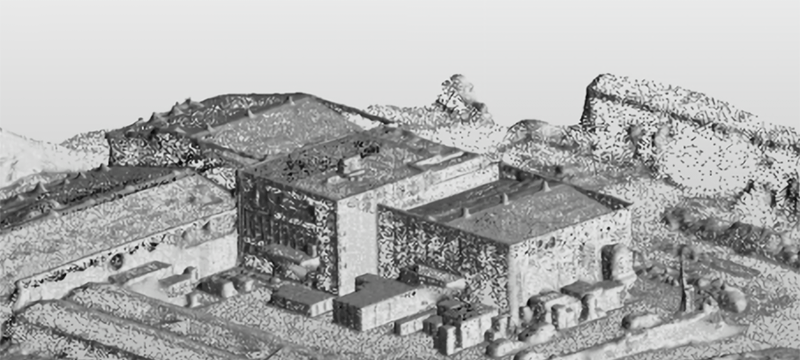
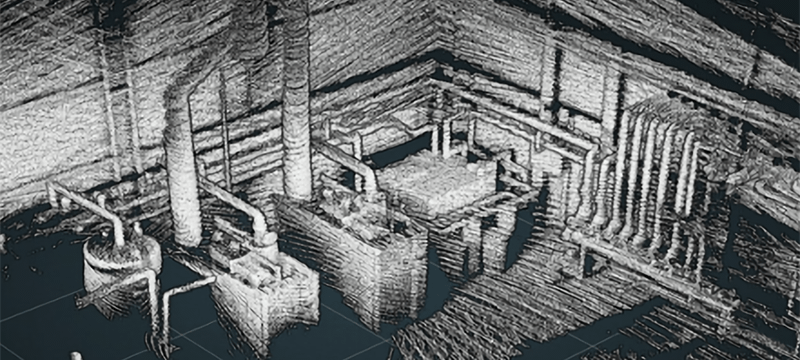

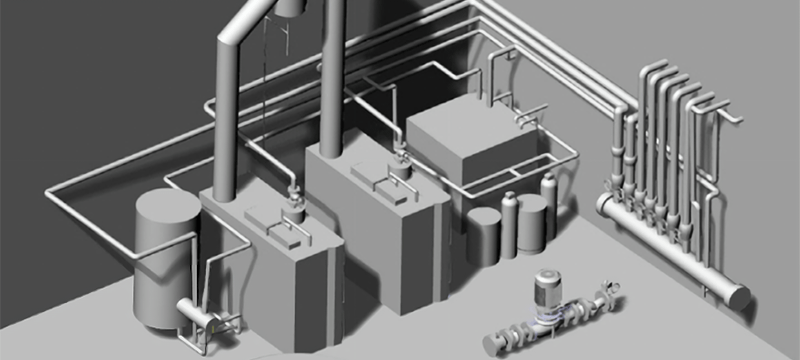
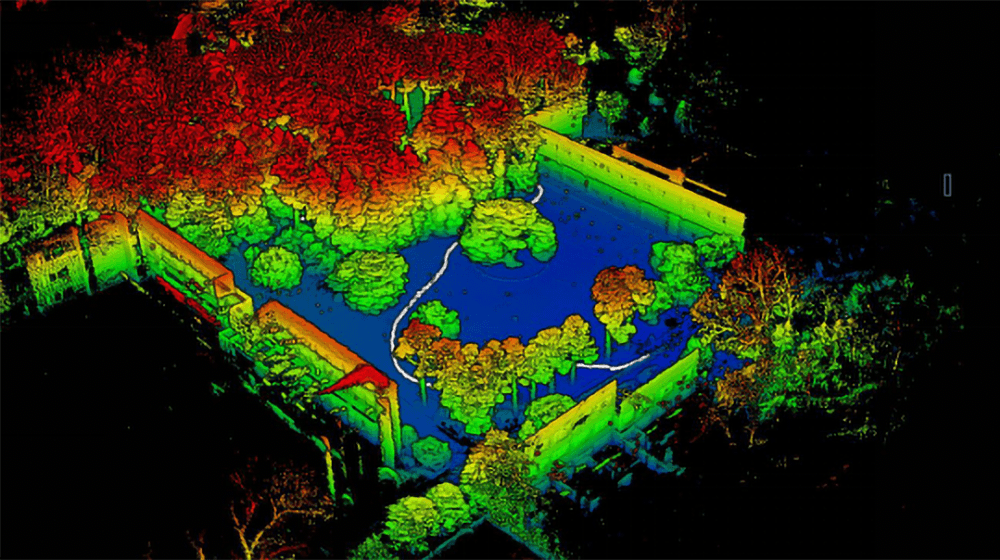
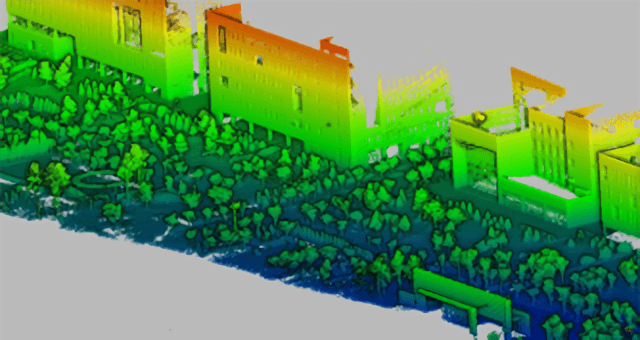
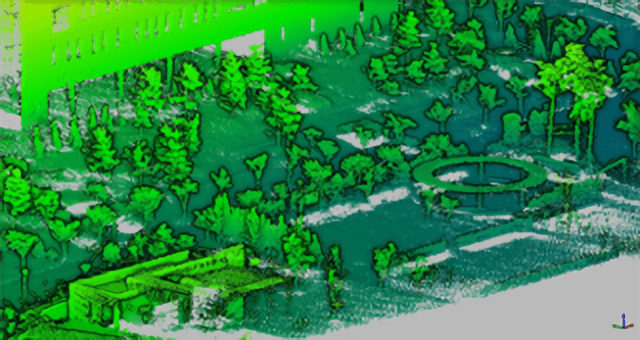
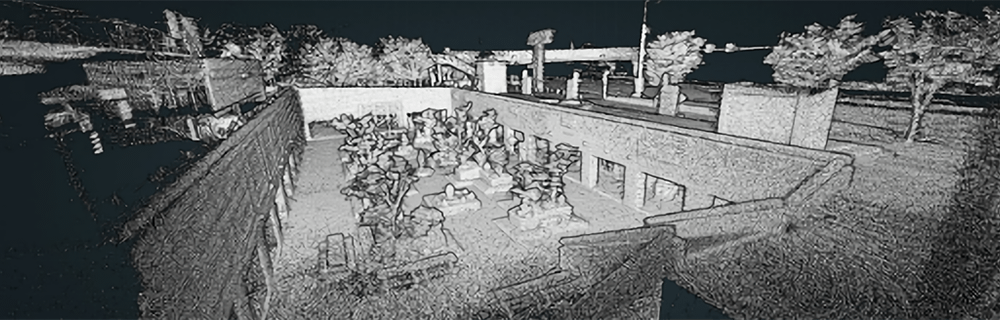
(上段)点群データ、(下段)点群データからCADで、3Dモデル化する
L-Replicaの仕様
| 出力 | 点群データと軌跡データ |
|---|---|
| 出力フォーマット | PLY |
| プロセッサ | Intel Core i7 Dual core |
| ポート | HDMI、USB 3.0 2、RJ-45 Ethernet、Thunderbolt 3 |
| 内蔵ストレージ容量 | 250GB SSD |
| OS | Linux Ubuntu 16.04 |
| ライダー | Velodyne lidar VLP-16 |
| ライダーの仕様 |
精度 3cm(短距離)、距離の2%(長距離) 最大距離 100m 速度 300,000点 /秒 視野 360°x30° |
| IMU Sensor | MEMS based IMU |
| 重量 | 約1.5kg |
| 電源 | 12-19V DC |
| プラットフォーム | ハンドヘルド、車体、ドローン |
本サイトの記述内容、および上記の仕様はよこくなく変更になる場合があります。